2020 has been an unprecedented year. There has been too much suffering around the world. I salute the brave frontline workers who have risked their lives to tackle this raging pandemic. Amidst all the negativity and toxicity in online social media, it is easy to miss many positive outcomes of 2020.
Personally, 2020 has been a year of many exciting research breakthroughs for me and my collaborators at NVIDIA and Caltech. We are grateful to have this opportunity to focus on our research. Here are some important highlights.
In the first part of this blog series, I will focus on generalizable AI algorithms while the subsequent posts will highlight ML methods, optimization, domain-specific AI algorithms, and DL frameworks. Check out the other posts here: handling distributional shifts (part 2), optimization for deep learning (part 3), AI4science (part 4), controllable generation (part 5), learning and control (part 6), learning frameworks (part 7).
Generalizable AI Highlights:
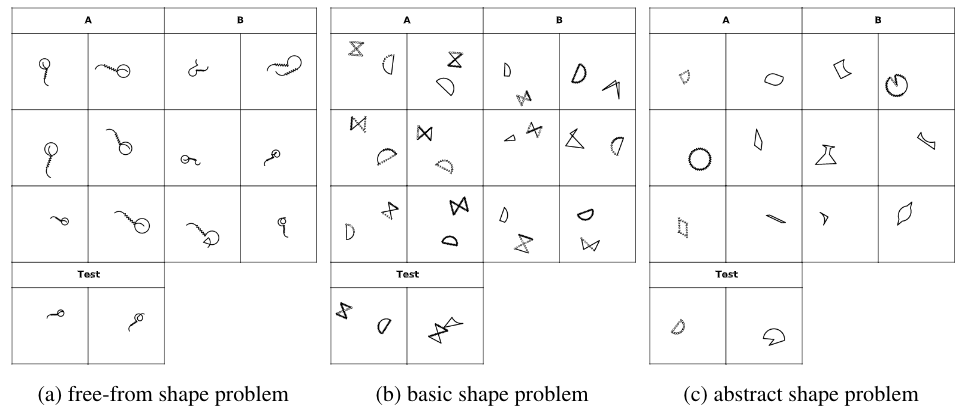
Concept learning and compositionality: We developed a new benchmark Bongard-LOGO for human-level concept learning and reasoning. Our benchmark captures three core properties of human perception: 1) context-dependent perception, in which the same object has disparate interpretations, given different contexts; 2) analogy-making perception, in which some meaningful concepts are traded off for other meaningful concepts; and 3) perception with a few samples but infinite vocabulary.
Our evaluations show that state-of-the-art deep learning methods perform substantially worse than human subjects, implying that they fail to capture core human cognition properties. Significantly, the neuro-symbolic method has the best performance across all the tests, implying the need for symbolic reasoning for efficient concept learning. Project
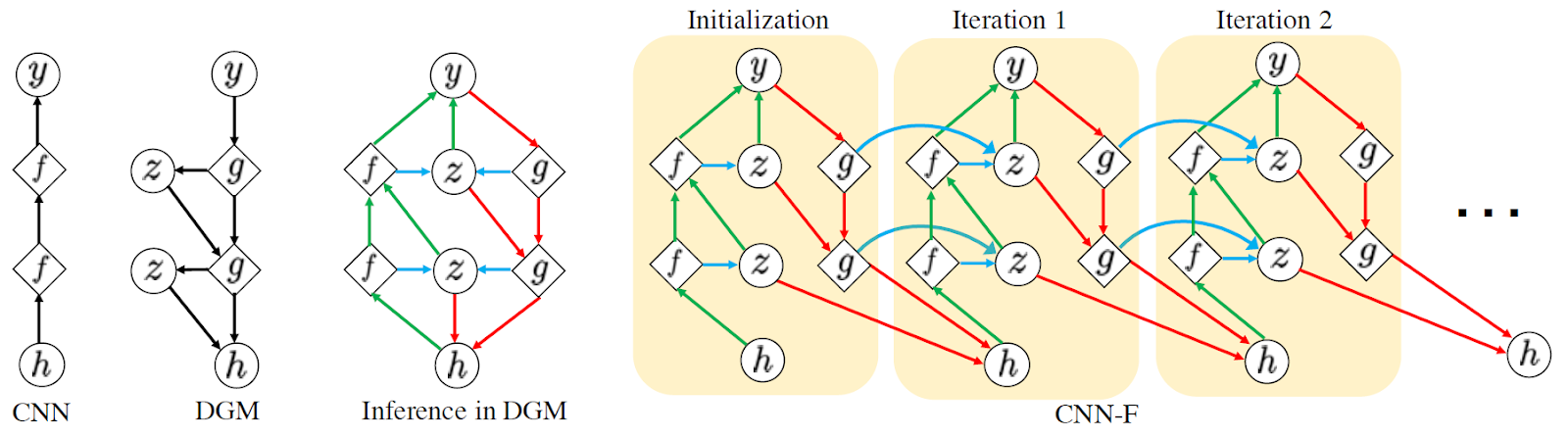
Conscious AI: Adding Feedback to Feedforward Neural Networks It is hypothesized that the human brain derives consciousness with a top-down feedback mechanism that incorporates a generative model of the world. Inspired by this, we design a principled approach t adding a coupled generative recurrent feedback into feedforward neural networks. This vastly improves adversarial robustness, even when there is no explicit adversarial training. Paper. Blog.
Adaptive learning: Generalizable AI requires the ability to quickly adapt to changing environments. We designed practical hierarchical reinforcement learning (RL) in legged robots that can adapt to new environments and tasks, not available during training. The training is carried out with NVIDIA Flex simulation environment that is physically valid and GPU accelerated. We adopted a hierarchical RL framework where the high-level controller learns to choose from a set of primitives in response to changes in the environment and a low-level controller that utilizes an established control method to robustly execute the primitives.
The model can easily transfer to a real-life robot without sophisticated randomization or adaption schemes due to this hierarchical design and having a curriculum of tasks during training. The designed controller is up to 85% more energy-efficient and is more robust compared to baseline methods. Blog
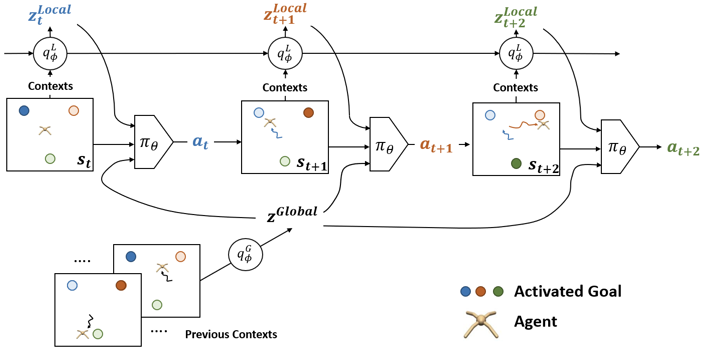
Real-world tasks often have a compositional structure that contains a sequence of simpler sub-tasks. We proposed a multi-task RL framework OCEAN to perform online task inference for compositional tasks. Here, the current task composition is estimated from the agent’s past experiences with probabilistic inference. We model global and local context variables in a joint latent space, where the global variables represent a mixture of sub-tasks that constitute the given task, while the local variables capture the transitions between the sub-tasks. Our framework supports flexible latent distributions based on prior knowledge of the task structure and can be trained in an unsupervised manner. Experimental results show that the proposed framework provides more effective task inference with sequential context adaptation and thus leads to a performance boost on complex, multi-stage tasks. Project
Causal learning: Being able to identify cause and effects is at the core of human cognition. This allows us to extrapolate to entirely new unseen scenarios and reason about them. We proposed the first framework that is able to learn causal structural dependencies directly from videos without any supervision on the ground-truth graph structure. This model combines unsupervised keypoint-based representation with causal graph discovery and graph-based dynamics learning. Experiments demonstrate that our model can correctly identify the interactions from a short sequence of images and make long-term future predictions on out of distribution interventions and counterfactuals. Project

Stay tuned for more!
You must be logged in to post a comment.